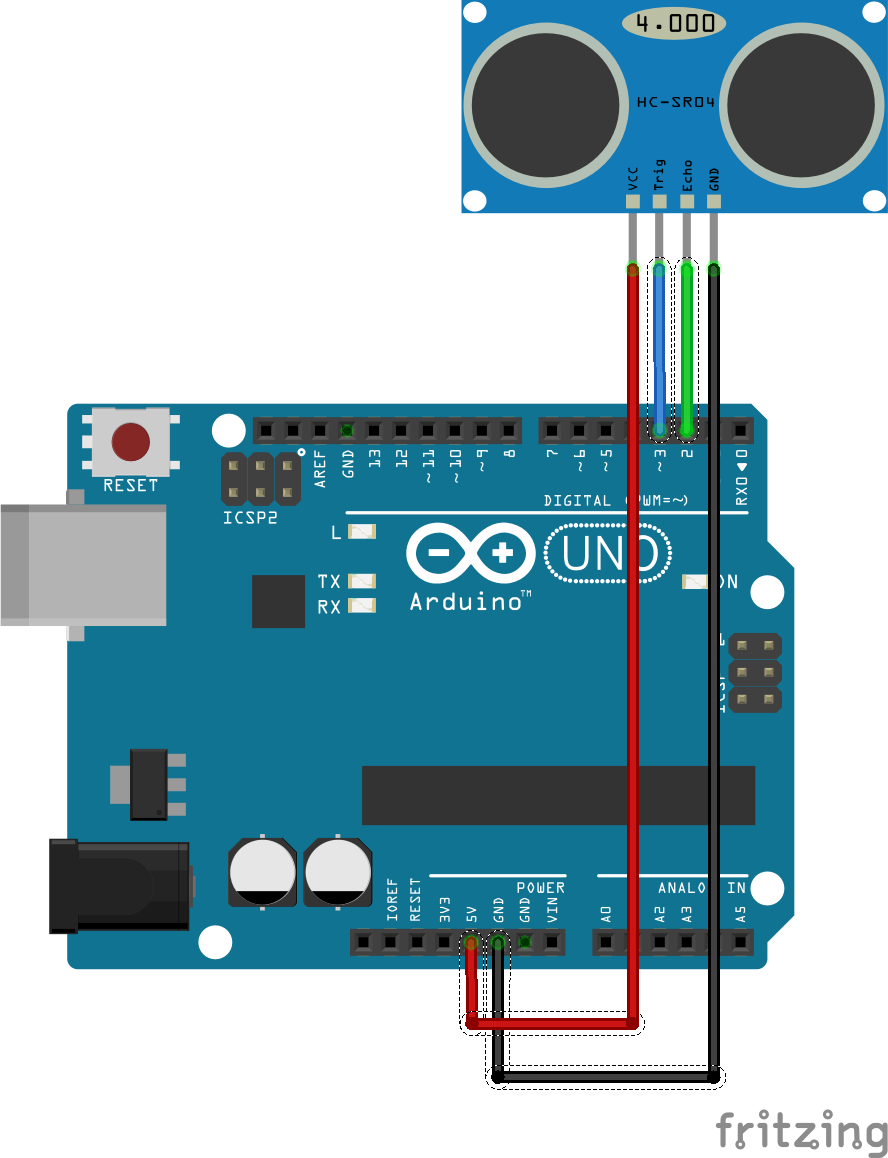
Los sensores de ultrasonidos sustituyen a los de infrarrojos cuando el objeto a detectar puede estar a distancias de entre 2cm a 1 o 2 metros. El ángulo de detección también es mayor que los infrarrojos. No son muy precisos, pero lo suficiente para nuestras aplicaciones. También son más bartos. Otro punto en contra es que son muy susceptibles al ruido, tanto ambiente como interno (el producido por un servo)
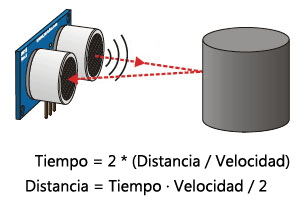
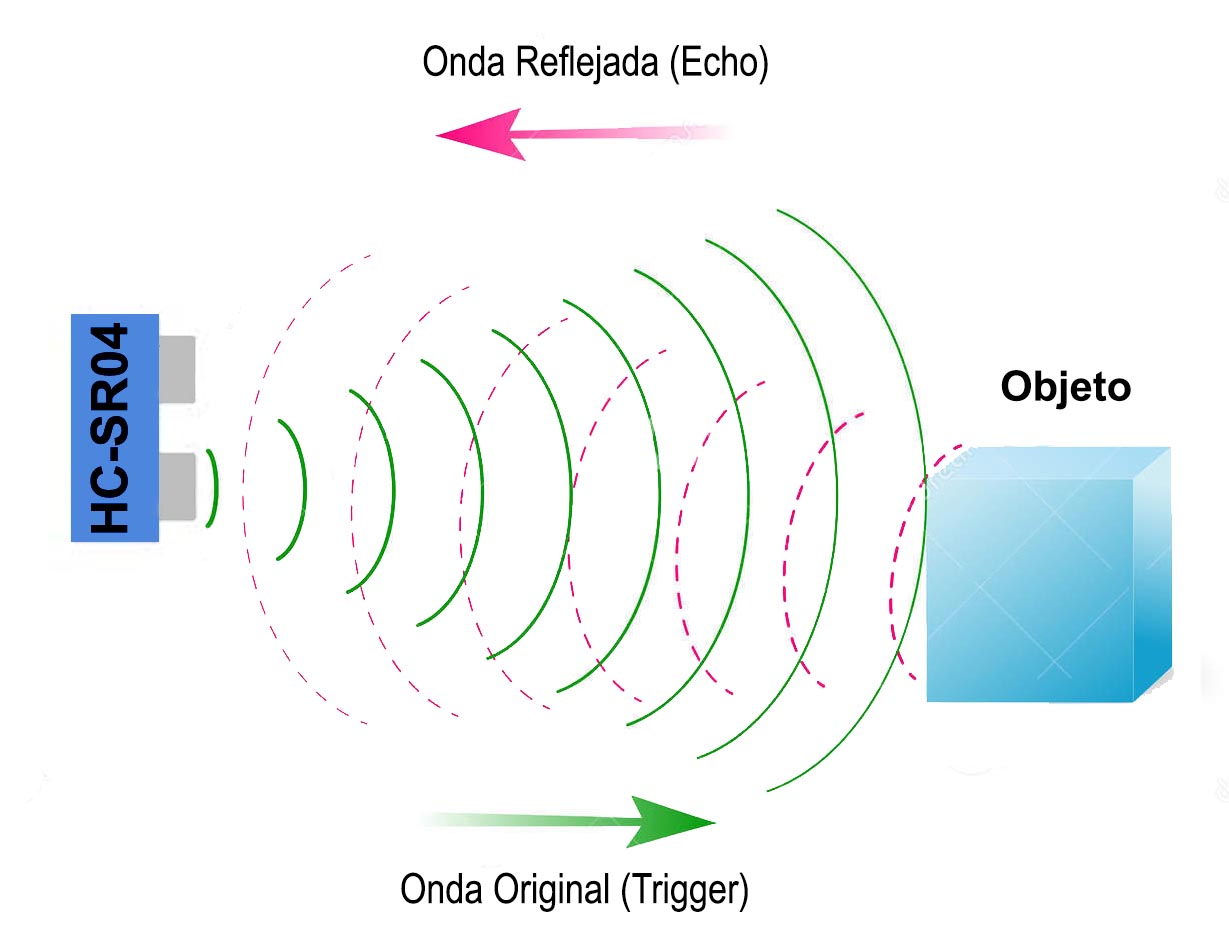
Para medir al distancia a la que se encuentra nuestro obstáculo utiliza la siguiente técnica: emite un frente de onda acustica (trigger) y mide el tiempo que tarda la onda en rebotar en el obstáculo y volver (echo). Conociendo el tiempo y la velocidad a la que el sonido viaja (que es más o menos constante), podemos conocer el espacio que hay entre nuestro robot y el obstáculo.
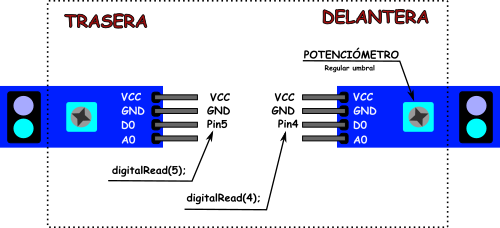
Usaremos un sensor de infrarrojos, el TCRT5000. Este sensor tiene salida analógica y digital, pero solo usaremos la digital (pin D0).
La señal digital pude tener 2 valores: